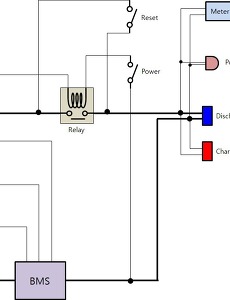
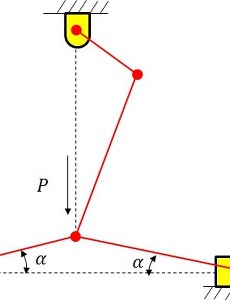
반응형 2018/0551 SG, FG, PE, LG 접지 용어의 뜻 SG Signal Ground 50V 이하의 저전압 회로의 접지 PCB 보드의 접지 FG Frame Ground (Chassis Ground) 제품 외함에 연결되는 접지 PE Protective Earth (Earth Ground) 안전을 위한 접지 LG Line Ground AC 전원 입력단의 캐패시터와 바리스터 등과 연결된 접지 정식 용어는 아님 PE 또는 FG에 연결 접지 기호 2018. 5. 31. 경사도 (Slope) 위 그림에서 경사도 (Grade, Slope)의 정의는 다음과 같다.경사도와 경사 각도는 다음 관계를 가진다.위 식을 적용하여 경사도에 따른 각도는 다음과 같다.도로 표지판에 적혀 있는 것은 경사 각도가 아니라 경사도 이다. 그래서, 경사도 30%은 16.7도의 경사 각도를 의미하고 경사도 30%는 1m 직진할 때마다 30cm씩 올라간다는 의미이다. 경사가 심한 고속도로가 7% 정도이고 경사가 심한 일반도로가 20% 정도이고 경사가 심한 골목길이나 지하 주차장 진입로가 30% 정도 이다. 2018. 5. 30. PLC 입출력 접점에서 싱크와 소스의 차이 PLC 등의 장비에서 입출력 접점(Digital Input/Output)은 크게 싱크(Sink) 타입과 소스(Source) 타입이 있다. 싱크는 입출력 접점으로 전류가 들어가는 것을 의미하고 소스는 입출력 접점으로 전류가 나오는 것을 의미한다. 싱크와 소스 타입의 입력 접점은 다음 그림과 같다. 어떤 제품의 입력 접점들은 보통 소스와 싱크 타입으로 모두 사용할 수 있는 경우도 있다. 싱크와 소스 타입의 출력 접점은 다음 그림과 같다. 릴레이 출력 접점은 결선에 따라 싱크와 소스 모두 사용할 수 있지만 트랜지시터 출력 접점은 싱크와 소스 모두 사용할 수 있는 경우도 가끔 있지만 대부분 둘 중 하나만 지원한다. 입력과 출력 접점을 연결할 때는 서로 반대되는 타입을 사용해야 한다. 즉, 소스 출력에는 싱크 입.. 2018. 5. 30. VDSL의 기본 이해 VDSL (Very-high-bit-rate Digital Subscriber Line)은 Untwisted Pair 또는 Twisted Pair 선을 통해 통신하는 방식으로 우리나라에서는 2000년 초중반까지 많이 사용한 방식으로 현재는 광랜으로 많이 대체되었다. VDSL은 최대 52Mbit/s의 다운로드 속도와 16Mbit/s의 업로드 속도를 가진다. VDSL는 25kHz~12MHz의 주파수 대역을 사용하고 2782개의 Tone으로 구성된다. 각각의 Tone은 4.3125kHz 대역의 가진다. VDSL은 캐리어 주파수에 신호가 실리는 브로드 밴드 통신으로 베이스 밴드 통신 방식인 이더넷에 비해 속도는 느리지만 훨씬 더 멀리 통신할 수 있다. 2018. 5. 29. 배터리 팩 회로도 리튬 이온이나 리튬 폴리머 또는 리튬 이산철 배터리를 이용하여 배터리 팩을 만들 때 회로도는 다음 그림과 같다. 전원 스위치로 램프가 내장된 스위치를 사용할 때는 아래 회로도의 Power Lamp는 전윈 스위치의 램프 단자에 연결한다. 충전 또는 방전 중 BMS가 동작하여 전원이 차단되었을 때는 Reset 스위치를 누른 상태에서 충전 또는 방전을 한다. 충전 중 BMS가 동작하면 방전 단자에 부하를 연결하여 방전을 시키면 되고 방전 중 BMS가 동작하면 충전 단자에 충전기를 연결하여 충전하면 된다. BMS가 동작하지 않은 정상 상태에서는 Reset 스위치를 OFF 시켜야 한다. 간혹 BMS 단자간에 리셋 스위치를 연결하기도 하는데 BMS가 동작한 상태에서 강제로 BMS를 바이패스 시키고 충방전을 하면 위.. 2018. 5. 29. 속도 프로파일 모터를 로봇팔이나 모바일 로봇에 사용할 때 속도 프로파일 (Velocity Profile)을 생성하여 제어한다. 프로파일은 Trajectory라고도 하면 Trajectory를 생성하는 것을 Trajectory Generation이라고 한다. 서보 드라이브나 로봇 컨트롤러 등에서 가장 많이 사용되는 속도 프로파일은 다음 그림과 같은 사다리꼴 속도 프로파일이다. 사라리꼴 속도 프로파일의 위치와 토크는 다음 그림과 같다. 거리의 그래프에서 기동과 정지 시에는 2차 함수 형태를 가지고 등속 구간에는 1차 함수 형태를 가진다. 사다리꼴 속도 프로파일을 사용하면 모바일 로봇의 기동과 정지 시 부드러운 가감속을 할 수 있다. 만약, 사다리꼴 속도 프로파일을 사용하지 않고 다음 그림과 같이 선형으로 거리를 이동 시키면.. 2018. 5. 28. 토글 메카니즘 토클 메카니즘(Toggle Mechanism)은 다음 그림과 같은 구조의 메카니즘을 의미한다. 위의 그림에서 수직으로 가해지는 힘 P와 F는 다음과 같은 관계를 가진다. α가 0에 가까워짐에 따라 F에 가해지는 힘은 무한대로 증가한다. 토글 메카니즘은 펀치 프레스, 크램프, 리벳 머신, 돌 분쇄기 등에 사용되며, 토글 메카니즘의 다른 형태는 다음과 같은 것들이 있다. 2018. 5. 28. 주파수 위상 지연에 따라 신호가 왜곡되는 이유 다음 그림 3의 신호는 그림 1과 그림 2의 신호의 합 이다. 즉, 그림 3의 신호는 2개의 주파수 성분을 가지는 신호이다. 만약 그림 1의 신호가 그림 4와 같이 90도 위상 차이가 발생한다고 가정한다. 이 때 그림 6은 그림 4와 그림 5의 신호의 합이 된다. 입력되는 주파수 성분 중 1개의 신호가 90도 위상 차이가 발생했을 때 그림 3과 그림 6의 신호와 같이 최종 신호의 모양이 많이 달라지게 되며 신호가 왜곡된다. 신호가 왜곡되는 것은 단순히 신호의 크기가 줄어드는 것이 아니라 신호의 모양 자체가 변하는 것이다. # 주파수 응답특성의 이해 2018. 5. 27. C# 숫자 - 문자 변환 자리수 (ToString, Format) i = 100; 코드 표시 문자 s = i.ToString("D"); "100" s = i.ToString("X"); "64" s = i.ToString("D8"); "00000100" s = i.ToString("X8"); "00000064" s = string.Format("{0,0}", i); "100" s = string.Format("{0,0:X}", i); "64" s = string.Format("{0,10}", i); " 100" s = string.Format("{0,10:X}", i); " 64" 2018. 5. 26. 이전 1 2 3 4 ··· 6 다음 반응형