반응형
Zeigler-Nichols 방법은 제어기의 PID 게인을 설정하는 방법이다.
Zeigler-Nichols 방법의 순서는 다음과 같다.
1. I와 D 게인을 0으로 설정하고 P 게인을 조금씩 올린다.
2. P 게인은 출력이 일정한 크기와 주기로 진동할 때까지 증가 시킨다. 이 때의 P 게인을 Ultimate gain (Ku)이라고 하고 이 때의 진동 주기를 Ultimate period (Tu)라고 한다.
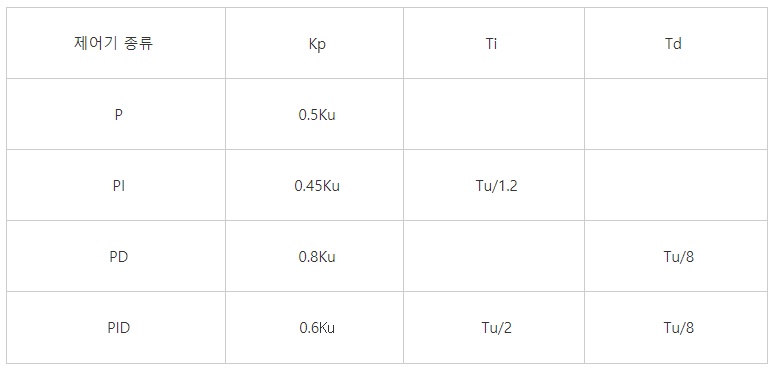
3. 위에서 구한 Ku와 Tu를 사용하여 다음과 같이 최종 PID 게인을 구한다.

이와 같은 방법은 시스템이 진동하다 발산할 수 있는 조금 위험한 방식이다. 그래서, Relay Auto Tuning이용한 Ku와 Tu를 구하는 방법을 많이 사용한다.
반응형
'전자공학 > 제어공학' 카테고리의 다른 글
| 모터의 벡터 제어 (Vector Control) (0) | 2018.06.10 |
|---|---|
| 속도 프로파일 (0) | 2018.05.28 |
| PID 제어 게인에 대한 이해 (0) | 2017.12.06 |
| PI 제어기에서 Anti-Windup 이란? (1) | 2017.08.14 |
| 마이너스 응답특성을 가지는 시스템의 제어기 설계 (0) | 2016.04.27 |



댓글