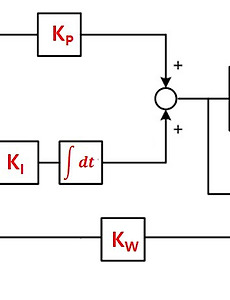
반응형 전자공학/제어공학6 모터의 벡터 제어 (Vector Control) 벡터 제어 (Vector Control)은 3상 AC 모터를 제어하는 방법 중 하나로 FOC (Field-Oriented Control)라고도 한다. 3상 AC 모터에는 PMSM와 같은 동기 모터나 유도 모터가 있다. 좀 더 정확한 분류는 벡터 제어에 FOC와 DTC (Direct Torque Control)가 있지만 보통 벡터 제어라함은 FOC를 의미한다. 벡터 제어는 1970년대 처음 개발되었고 1980년대 초부터 상용화 되었다. 현재 사용되는 PMSM 서보 드라이브나 유도 모터 인버터에는 거의 대부분 벡터 제어 기법을 사용하고 있다. 3상 AC 모터를 제어하기 위해 3상의 전압, 전류를 각각 제어하는 것을 Scalar Control이라고 한다. 이에 반해 벡터 제어는 3상 전압과 전류를 dq 변환 .. 2018. 6. 10. 속도 프로파일 모터를 로봇팔이나 모바일 로봇에 사용할 때 속도 프로파일 (Velocity Profile)을 생성하여 제어한다. 프로파일은 Trajectory라고도 하면 Trajectory를 생성하는 것을 Trajectory Generation이라고 한다. 서보 드라이브나 로봇 컨트롤러 등에서 가장 많이 사용되는 속도 프로파일은 다음 그림과 같은 사다리꼴 속도 프로파일이다. 사라리꼴 속도 프로파일의 위치와 토크는 다음 그림과 같다. 거리의 그래프에서 기동과 정지 시에는 2차 함수 형태를 가지고 등속 구간에는 1차 함수 형태를 가진다. 사다리꼴 속도 프로파일을 사용하면 모바일 로봇의 기동과 정지 시 부드러운 가감속을 할 수 있다. 만약, 사다리꼴 속도 프로파일을 사용하지 않고 다음 그림과 같이 선형으로 거리를 이동 시키면.. 2018. 5. 28. PID 제어 게인에 대한 이해 PID 제어기의 게인을 맞추는 것은 조금 까다롭다. 하지만, PID 게인에 대한 대략적인 특성을 이해하면 게인 설정에 도움이 된다. I 게인은 적분기의 게인으로 적분기는 LPF 특성을 가진다. 그래서, I 게인을 증가시키면 응답 속도는 줄어들지만 노이즈를 필터링하는 효과가 있다. 높은 주파수의 진동이 발생한다면 I 게인을 증가 시키면 된다. D 게인은 미분기의 게인으로 미분기는 HPF 특성을 가진다. 그래서, D 게인을 증가시면 응답 속도는 증가하지만 노이즈에 민감해 진다. 진동이 발생한다면 D 게인을 줄여야 한다. P 게인이 높으면 응답 속도는 높아지지만 진동이 심해진다. 출력이 레퍼런스 값에 도달하지 못한다면 I 게인을 높여야 한다. 큰 주기의 진동이 발생한다면 P 게인이 너무 낮고 I 게인이 너무 .. 2017. 12. 6. PI 제어기에서 Anti-Windup 이란? PID 또는 PI 제어기의 I 제어기를 사용할 때는 Anti-Windup 처리를 반드시 해야한다. Anti-Windup이란 출력이 리밋에 걸릴 때 그 차이에 따라 적분 성분을 차감하는 것이다. 만약 적분 성분을 차감하지 않으면 출력은 리밋에 걸렸는데 적분 성분은 계속해서 증가하여 거의 무한대의 값으로 증가하고, 이 때 역방향으로 제어를 하려고 하면 적분된 거의 무한대의 값에 의해 반대 방향으로 움직이지 못하고 적분 성분이 해소될 때까지 계속해서 정방향으로 움직이게 된다. 가장 단순한 Anti-Windup은 리밋에 걸릴 때 그 시점의 적분을 중지하는 방법이고 그 외에 매우 많은 방법들이 있다. 아래 그림은 가장 일반적인 Anti-Windup 방법이다. Kw는 Anti-Windup 게인 이다. 리밋에 걸리지.. 2017. 8. 14. Zeigler-Nichols 방법을 사용한 PID 게인 설정 방법 Zeigler-Nichols 방법은 제어기의 PID 게인을 설정하는 방법이다. Zeigler-Nichols 방법의 순서는 다음과 같다. 1. I와 D 게인을 0으로 설정하고 P 게인을 조금씩 올린다. 2. P 게인은 출력이 일정한 크기와 주기로 진동할 때까지 증가 시킨다. 이 때의 P 게인을 Ultimate gain (Ku)이라고 하고 이 때의 진동 주기를 Ultimate period (Tu)라고 한다. 3. 위에서 구한 Ku와 Tu를 사용하여 다음과 같이 최종 PID 게인을 구한다. 이와 같은 방법은 시스템이 진동하다 발산할 수 있는 조금 위험한 방식이다. 그래서, Relay Auto Tuning이용한 Ku와 Tu를 구하는 방법을 많이 사용한다. 2017. 8. 13. 마이너스 응답특성을 가지는 시스템의 제어기 설계 일반적인 제어기 구조는 다음 그림과 같다. Reference에서 출력값을 뺀 차이를 제어기의 입력으로 사용한다. 제어대상인 Plant의 응답특성이 다음 그림과 같을 때 PI 제어기의 PI 게인은 모두 플러스이다. 하지만, Plant의 응답특성이 다음 그림과 같이 마이너스 일때 PI 제어기의 PI 게인은 마이너스가 된다. Plant의 응답특성이 마이너스일때는 다음 그림과 같이 출력값에서 Reference 값을 뺀 차이값을 사용하면 PI 제어기의 PI 게인이 모두 플러스가 되고, 보다 쉽게 제어기를 설계할 수 있다. 2016. 4. 27. 이전 1 다음 반응형